Nastavitelný interaktivní pružinkátor se dvěma závažími
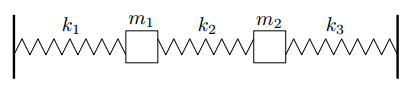
Uvažujme podélné kmity dvou závaží na pružinkách s pevnými konci s obecnými parametry, tzn. máme obecné hmotnosti $m_1$, $m_2$ a tuhosti pružin $k_1$, $k_2$ a $k_3$.
Pro tento pružinkový systém vypadá matice kinetické a potenciální energie následovně:
\[ \mathbb{T} = \left( \begin{array}{cc} m_1 & 0 \\ 0 & m_2 \end{array}\right), \qquad \mathbb{U} = \left( \begin{array}{cc} k_1 + k_2 & -k_2 \\ -k_2 & k_2 + k_3 \end{array} \right). \]
Řešení úlohy malých kmitů spočívá v najití vlastních čísel a vlastních vektorů matice $\mathbb{T}^{-1} \mathbb{U}$. Hledáme, pro která $\omega$ má následující rovnice netriviální řešení v $\vec{a}$:
\[ (\mathbb{U} - \omega^2 \mathbb{T})\vec{a} = 0 \]
Vyřešením této úlohy dostaneme:
\[ D = \sqrt{(m_1(k_2+k_3)+m_2(k_1+k_2))^2 - 4m_1m_2(k_1k_2 + k_1k_3 + k_2k_3)} \]
\[ \omega_1^2 = \frac{m_1(k_2+k_3) + m_2(k_1+k_2) - D}{2m_1m_2} \qquad \omega_2^2 = \frac{m_1(k_2+k_3) + m_2(k_1+k_2) + D}{2m_1m_2} \]
\[ \vec{a}_1 = \left( \begin{array}{cc} \frac{m_1(k_2+k_3) - m_2(k_1+k_2) + D}{2m_1k_2} \\ 1 \end{array} \right) \qquad \vec{a}_2 = \left( \begin{array}{cc} \frac{m_1(k_2+k_3) - m_2(k_1+k_2) - D}{2m_1k_2} \\ 1 \end{array} \right) \]
A obecné řešení pohybových rovnic je klasicky
\[ \vec{x}(t) = A_1 \vec{a}_1 \cos(\omega_1 t + \varphi_1) + A_2 \vec{a}_2 \cos(\omega_2 t + \varphi_2). \]
A zde je již vlastní interaktivní pružinkátor, kde se dají nastavit jednotlivé parametry systému (pomocí poněkud vachrlatých sliderů): amplitudy jednotlivých módů $A_1$ a $A_2$, fázový posun $\varphi$ druhého módu vůči prvnímu (tzn. $\varphi_1 = 0$, $\varphi_2 = \varphi$), hmotnosti těles $m_1$ a $m_2$ a tuhosti pružin $k_1$, $k_2$ a $k_3$. Graf vpravo znázorňuje trajektorii systému v konfiguračním prostoru (prostoru všech poloh daného systému).
Vytvořeno s pomocí oCanvas (autor Johannes Koggdal / knihovna vydána pod MIT licencí)